Hi there!
I was following the ROSPlane guide in the link below just to test that everything is configured and installed correctly: https://docs.rosflight.org/git-main/user-guide/rosplane-setup/
I first launched the Gazebo simulation with:
ros2 launch rosflight_sim fixedwing_sim_io_joy.launch.py aircraft:=anaconda
ros2 launch rosplane_sim sim.launch.py aircraft:=anaconda
Then I used the service call to arm the plane and override the RC with:
ros2 service call /toggle_arm std_srvs/srv/Trigger
ros2 service call /toggle_override std_srvs/srv/Trigger
With that, the plane starts to take off and I see several messages like:
[rosplane_controller-1] [INFO] [1745525024.459377047] [autopilot]: takeoff
[rosplane_controller-1] [INFO] [1745525026.039384466] [autopilot]: climb
[rosplane_controller-1] [INFO] [1745525027.139306131] [autopilot]: takeoff
[rosplane_controller-1] [INFO] [1745525028.519336315] [autopilot]: climb
[rosplane_path_manager-3] [WARN] [1745525028.537938300] [path_manager]: No waypoints received, orbiting origin at 50 meters.
[rosplane_controller-1] [INFO] [1745525029.509263556] [autopilot]: takeoff
[rosplane_controller-1] [INFO] [1745525031.229256937] [autopilot]: climb
[rosplane_controller-1] [INFO] [1745525031.549212840] [autopilot]: takeoff
[rosplane_controller-1] [INFO] [1745525033.099189781] [autopilot]: climb
[rosplane_path_manager-3] [WARN] [1745525033.547887456] [path_manager]: No waypoints received, orbiting origin at 50 meters.
[rosplane_estimator_node-5] [WARN] [1745525037.130907087] [estimator]: min roll angle
[rosplane_estimator_node-5] [WARN] [1745525037.140905152] [estimator]: min roll angle
[rosplane_estimator_node-5] [WARN] [1745525037.150907865] [estimator]: min roll angle
[rosplane_estimator_node-5] [WARN] [1745525037.160900810] [estimator]: min roll angle
[rosplane_estimator_node-5] [WARN] [1745525037.170958478] [estimator]: min roll angle
[rosplane_estimator_node-5] [WARN] [1745525037.180900258] [estimator]: min roll angle
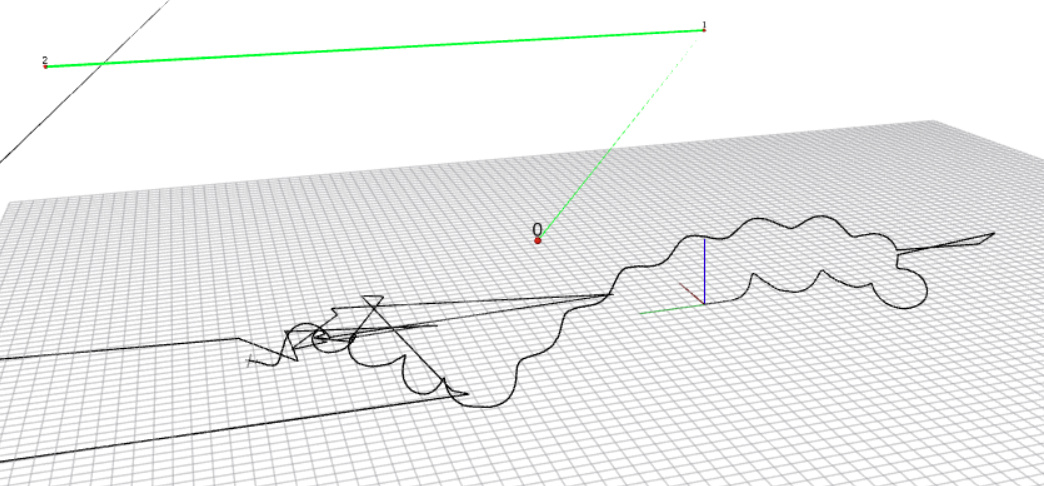
At the same time, the plane starts spinning around with no direction until the state changes to HOLD, and then it stays upside down flying really close to the ground without following any waypoint that I provided with the CLI:
ros2 service call /load_mission_from_file rosflight_msgs/srv/ParamFile "{filename: <FILENAME>}"
I am using the provided fixedwing_mission.yaml file.
I also tried to upload the waypoints before arming and override RC, but the results are the same.
Am I doing something wrong? I have all the parameters configured as the “fixedwing_firmware.yaml” file is right now. See below a print from rviz of the plane trajectory.