
I am confused as to which part of ROSflight is implemented where. Are the estimator, controller, etc. running on the micro-controller or the companion computer?
What is the role of each of the micro-controller and the companion computer?
Which one has the control law and estimators and stuff?
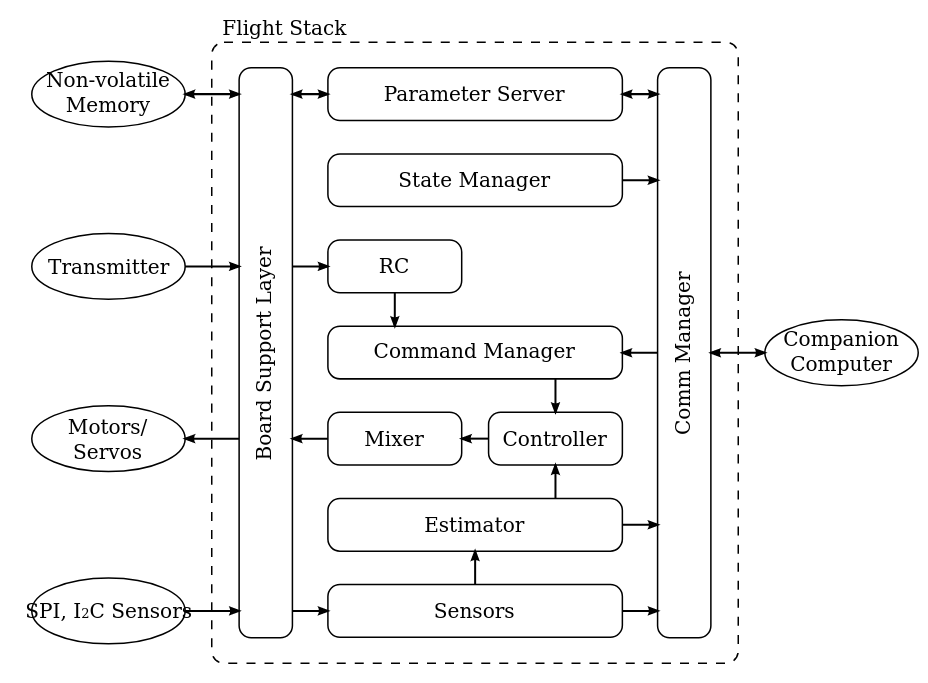
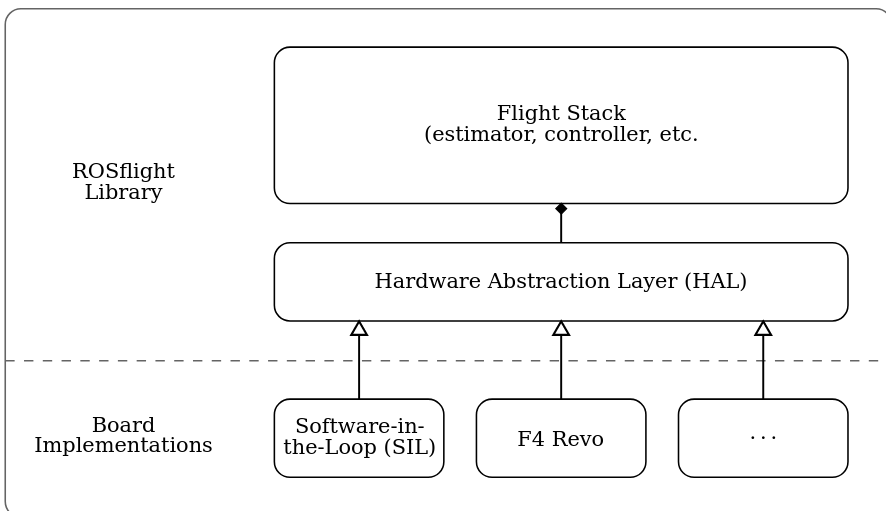
is all the stuff in the middle on the microcontroller? where is the part for the microntroller in the code?