
I am trying to run RosFlight with Gazebo for multirotor as mentioned here:
Quick-Start Guide to SIL Simulation
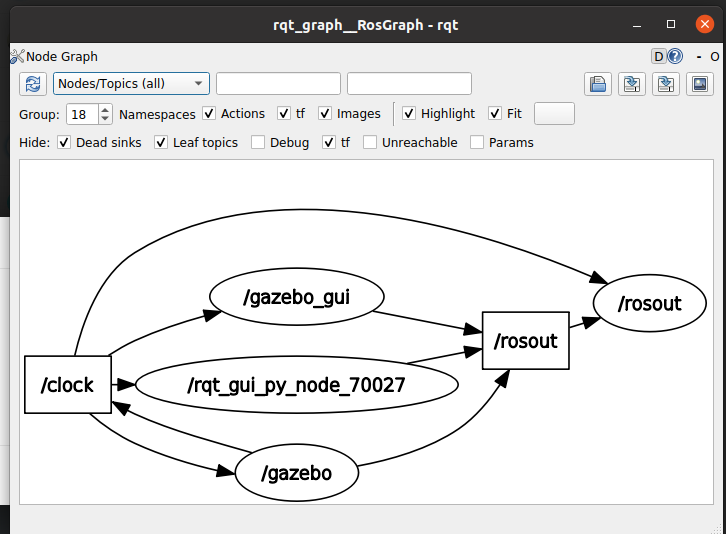
However I am not able to get the same RQT graph as mentioned in the documentation. Please help
screen shot of my rqt_graph:
Ubuntu:20.04
Ros distribution: noetic