
I am using ROS2 humble. I want to use the Taranis QX7 as a remote controller, but it does not connect. Can you possibly solve this problem? please.
Taranis qx7 error
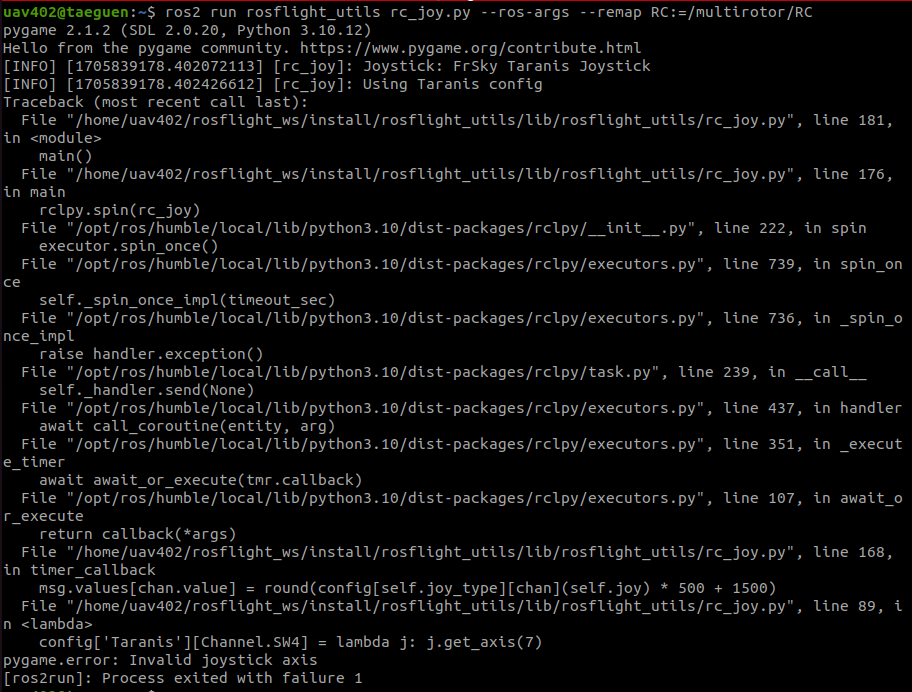
I fixed the error and pushed the fix to the main branch, so if you pull that commit then it should work.
The rc_joy.py node uses Pygame to interact with controllers and transmitters, and the code was attempting to get one more axis than Pygame had, so I ended up removing it. I’m not sure if the number of inputs is limited by Pygame or OpenTX, but you still should be able to use all four channels on the sticks and three auxiliary channels, which hopefully should be enough.
Thank you. It worked successfully.